2023年10月1日至5日,IEEE/RSJ 智能机器人与系统国际会议(IROS 2023)在美国密歇根州底特律市召开。本次会议由电机电子工程师学会(IEEE)、日本机器人学会(RSJ)主办,会议主题为“下一代机器人”,突出强调年轻研究人员的贡献,引领机器人科技迈向未来。中心王生进老师带领的学生团队受邀在自动驾驶和智能协作机器人领域展示了相关前沿研究。鲁宇豪作题为 “VL-Grasp: a 6-Dof Interactive Grasp Policy for Language-Oriented Objects in Cluttered Indoor Scenes”的邀请报告,该文章创新性地将视觉语言推理和6-Dof抓取姿势检测结合起来,有效提高了协作机器人在复杂、有歧义的场景下执行抓取任务的能力,实现了机器人根据人类语言指令抓取指定物体的多模态操作。
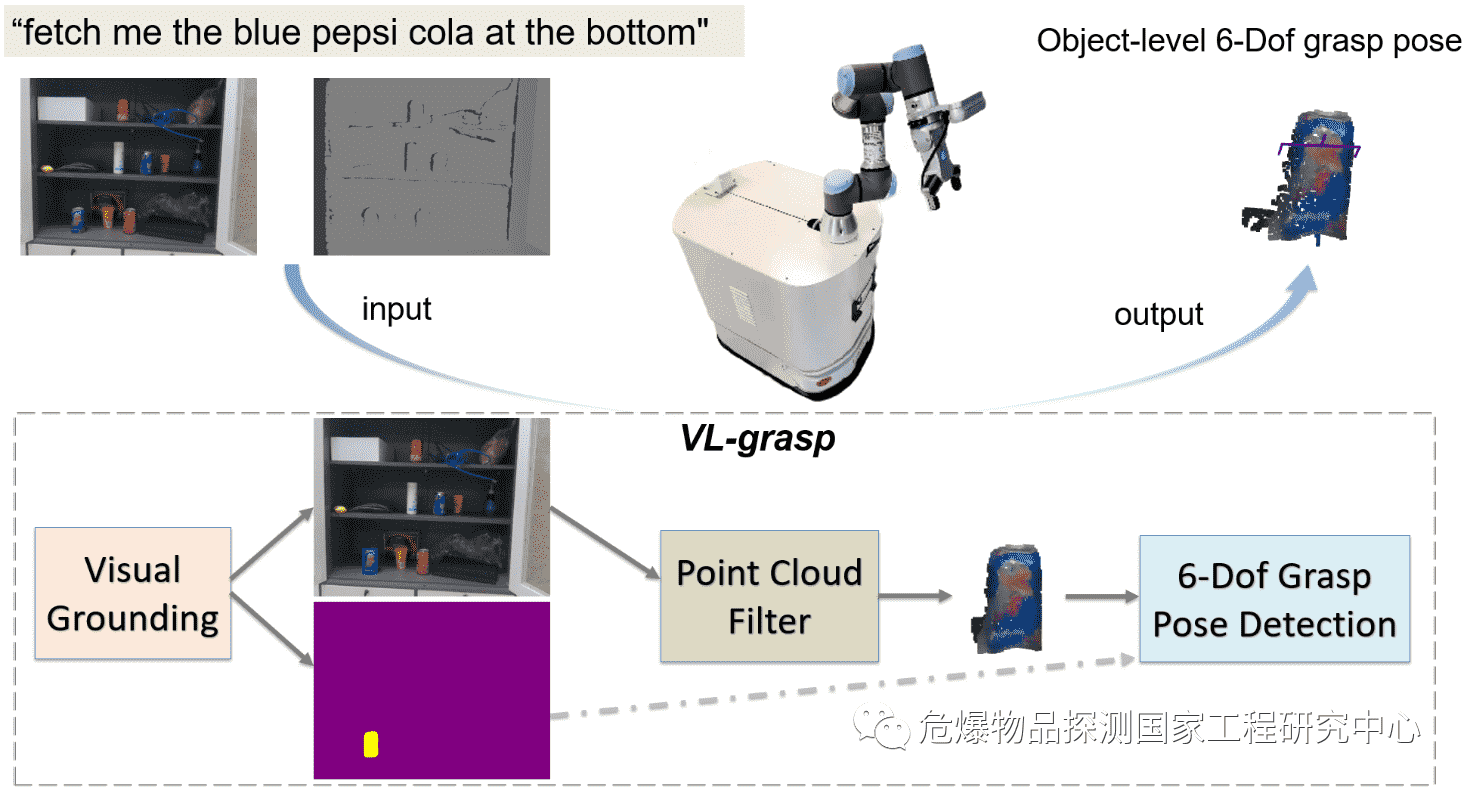
文章所提出的算法流程框图
樊懿轩作题为“Look Before You Drive: Boosting Trajectory Forecasting via Imagining Future” 的邀请报告,该文章针对自动驾驶轨迹预测问题提出了一种两阶段的方法,充分考虑了交通场景中多智能体的主观能动性,在开源数据集上达到先进性能。

文章所提出的算法在多样场景中展示了精准丰富的轨迹预测能力
IROS会议全称IEEE/RSJ International Conference on Intelligent Robots and Systems,是IEEE机器人和自动化协会面向机器人、AI和自动化领域组织召开的旗舰会议。IROS是国际机器人研究界的重要论坛,聚焦智能机器人和智能机器技术领域的科技前沿,强调未来方向以及最新的方法、设计和成果。


